
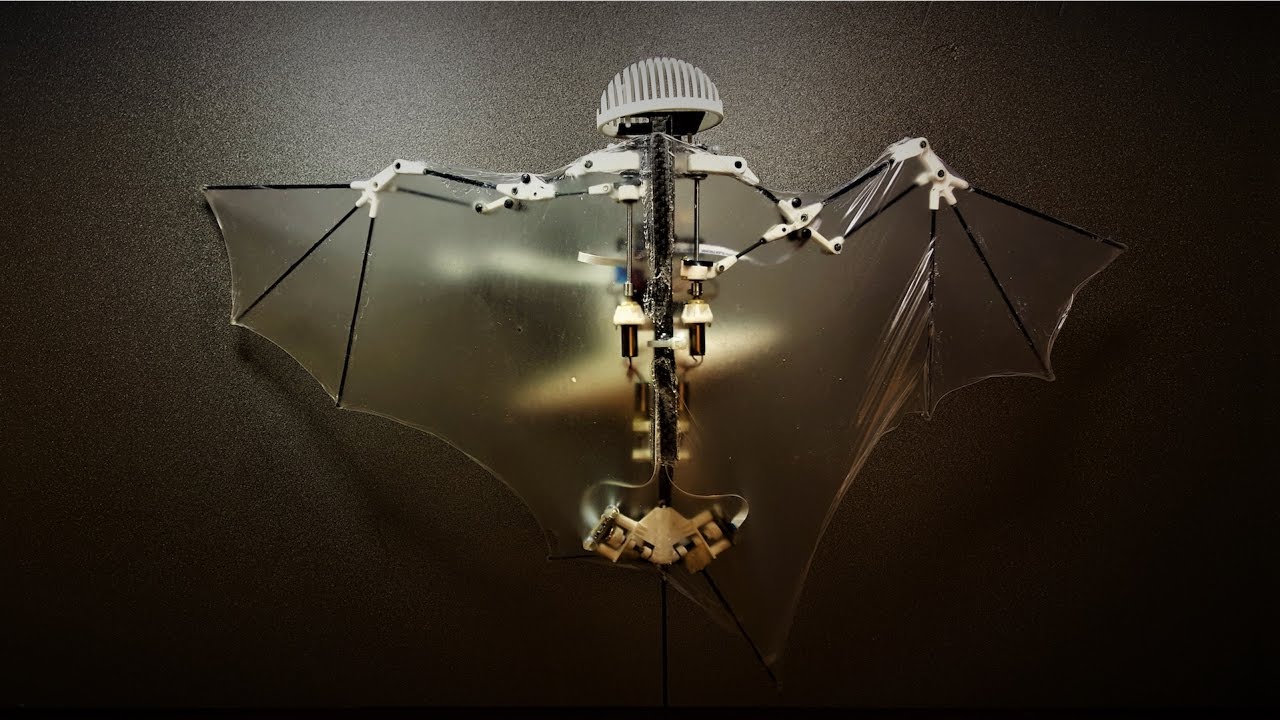
伊利诺伊大学厄巴纳-香槟分校的飞行机器人拥有铰接式变形机翼,可以实现复杂的运动。
认证的益处
- 敏捷
- 自动驾驶
- 动态
应用领域
- 机器人
- 航空
- 监控
- 航空航天
联合国可持续发展目标的落实
-

目标 9:行业创新和基础设施
挑战
机器人由许多组件组成:身体、能量存储、各种传感器等等。 所有这些部件协同工作以执行机器人的设计功能。 不幸的是,这些部件通常又重又庞大。 增加的重量会导致飞行机器人无法维持长途飞行,并增加飞行途中耗尽电力的风险。
创新细节
该飞行机器人也称为蝙蝠机器人(B2),是一种独立的机器人,具有柔软的铰接机翼,可以自主移动。 由于其灵活的结构材料以及大量的主动和被动关节,机翼在飞行过程中可以轻松改变形状,而不影响空气动力学。 由于独特的机翼结构,机器人能够持续高效地移动。
仿生故事
蝙蝠利用其敏捷性来躲避掠食者并捕获猎物。 它们的翅膀有 40 多种关节,将肌肉和骨骼连接成肌肉骨骼系统,有助于其独特的飞行机制。 它们的机翼就像灵活的橡胶板一样,充满空气并在飞行中变形,而它们的关节则协调一致的空气动力学。






