
Domed robots mimic snail locomotion and suction capabilities to move separately and join together.
Benefits
- All-terrain mobility
- Obstacle crossing
- Reconfigurable robotic structures
Applications
- Search and rescue
- Environmental monitoring
- Infrastructure maintenance
The Challenge
Robotic swarms, designed to perform various tasks in controlled indoor environments, frequently encounter significant limitations when deployed in outdoor, unstructured settings. Traditional designs typically rely on rigid, predefined formations and connections that lack the flexibility to adapt to unpredictable and varied terrain. Furthermore, the stability of these systems is often compromised due to the freeform connections between individual units, making them less effective in environments that demand robustness and adaptability.
In addition to physical limitations, most terrestrial robotic swarms are not designed for dynamic reconfiguration under real-world conditions, limiting their usability across different scenarios. This results in a decreased efficiency and a reduced range of tasks that such systems can handle effectively.

This illustration showcases the operational versatility of the snail-inspired robots: Individually, a single robot is capable of navigating diverse outdoor terrains and scaling metal structures for surveillance tasks. In collaboration, the robots adeptly handle complex landscapes including stepped, trench-filled, and other difficult terrains. Together, they can also configure into collective structures, such as robotic arms, to manipulate objects effectively.
Innovation Details
The snail-inspired robotic swarm system revolutionizes terrestrial robotics by incorporating unique dual-mode connection mechanisms based on the biological traits of land snails. This approach enhances both adaptability and robustness, allowing for seamless operation in diverse and challenging environments.
To the versatile locomotion of snails, the system utilizes a free mode where robots are equipped with magnet-embedded tracks. These tracks provide freeform mobility, enabling the robots to adapt dynamically to their surroundings. This mode is optimized for tasks that require high maneuverability and rapid response times.
For situations that demand enhanced stability, such as navigating over rough terrain or in adverse weather conditions, the robots switch to strong mode. This mode employs vacuum suckers combined with directional stalks, which mimic the adhesive properties of a snail’s foot. This design allows for robust, secure connections between individual robots, significantly enhancing the swarm’s overall stability and resilience.
The dual-mode capability ensures that the robotic swarm can switch between high-speed, agile movements and strong, stable configurations as needed. This adaptability is critical for a wide range of applications, from environmental monitoring and agriculture to search and rescue operations.
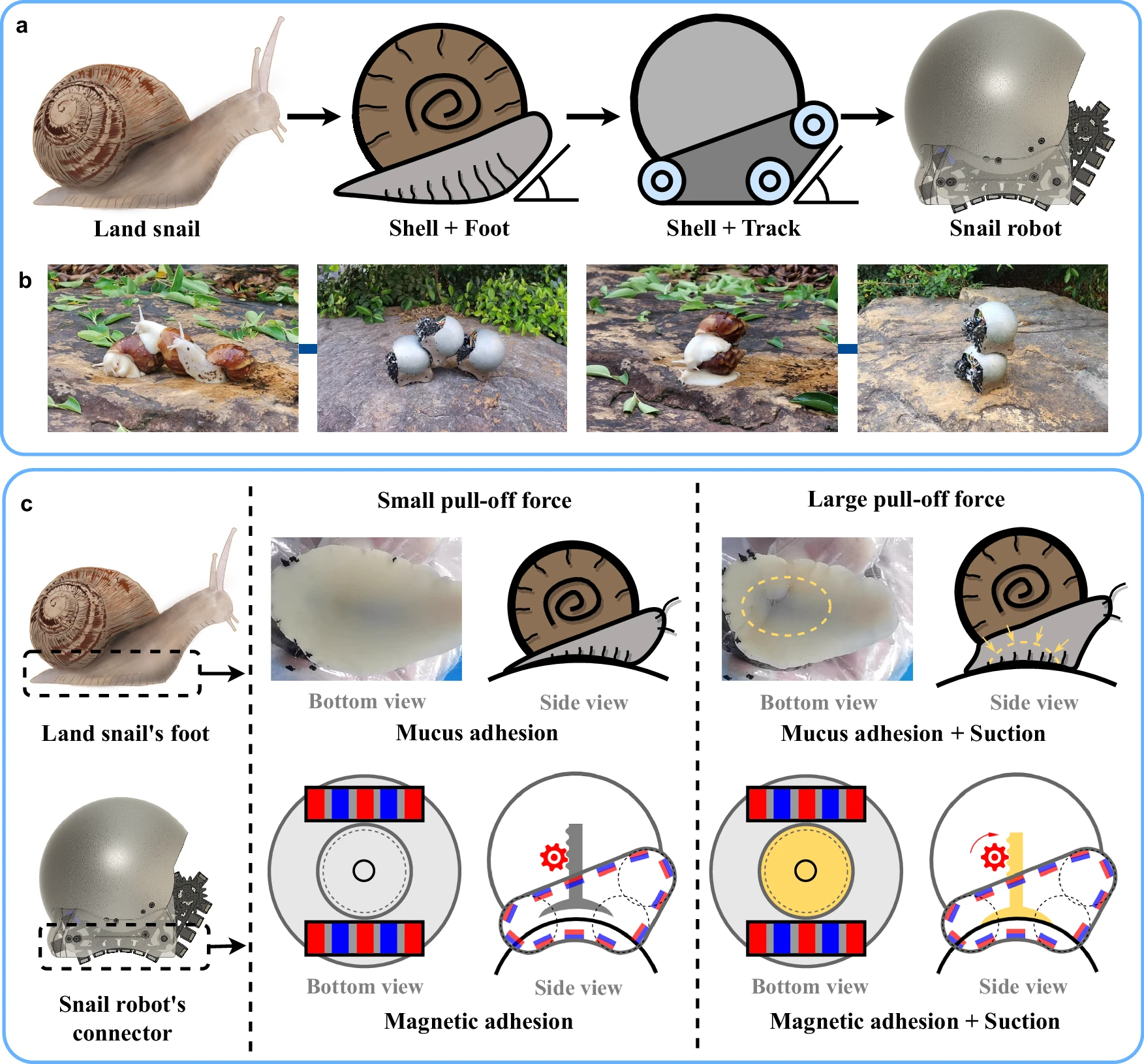
a) Morphological evolution from a snail to a snail robot. b) Snails outdoors may climb onto another snail’s shell for various reasons. Inspired by this, snail robots can also interconnect with each other. c) Comparative illustration of snail foot adhesion and snail robot connection mechanism under varying external forces. (Zhao, D., Luo, H., Tu, Y. et al.)
Biological Model
Snails manage to thrive across a variety of terrains, from dry land to moist habitats, using their unique biological features.
Land snails are equipped with a muscular foot that contains glandular tissues capable of secreting mucus. This mucus plays a critical role in motion and adhesion, allowing snails to adhere to multiple surfaces—even those that are vertical or upside down. The secret lies in the texture and chemical properties of the mucus, which can be modified depending on the environmental conditions, such as surface texture and moisture levels.
The foot’s structure also features complex muscular movements that facilitate locomotion while maintaining stability and grip through various terrains. This dual capability of motion and adhesion inspired the robotic swarm’s two-mode connection mechanism: the free mode for mobility and the strong mode for enhanced stability and adhesion.
AI on AskNature
This page was produced in part with the assistance of AI, which is allowing us to greatly expand the volume of content available on AskNature. All of the content has been reviewed for accuracy and appropriateness by human editors. To provide feedback or to get involved with the project, contact us.





